Motor asíncrono
Existen dos razones fundamentales para llamar a este tipo de motor: motor asíncrono.
1. No hay una corriente conducida a uno de los arrollamientos. La corriente que circula por uno de los
devanados (generalmente el rotor) se debe a la f.e.m. inducida por la acción del flujo del otro devanado, y por esta razón
se les llama motores de inducción.
2. La velocidad de giro del rotor no es la de la frecuencia de red. Aunque llegados a este punto, hay
que indicar que el control de la velocidad de estos motores se realiza controlando y modificando la frecuencia de red que reciben.

Tipos de motores asíncronos
La clasificación de los motores de inducción se realiza según el tipo de rotor que tenga montado el motor de
inducción. Así tenemos que básicamente existen 2 tipos de motores asíncronos o de inducción.
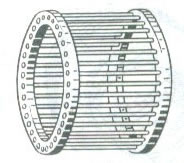
1. Motor asíncrono con rotor de Jaula de ardilla o, llamado de otra manera, rotor en cortocircuito.
Se le llama rotor de Jaula de ardilla, por su parecido a una jaula de contener estos curiosos animalitos.

2. Motor asíncrono con rotor bobinado o, llamado de otra manera, motor asíncrono de
anillos rozantes.


Se podrían hacer otros tipos de clasificaciones, diferenciándolos por su utilidad, su potencia, su tamaño, etc. Pero lo cierto es que toda la literatura que he consultado realizan la clasificación según el tipo de rotor.
Partes del motor asíncrono
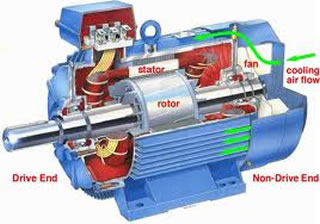
El estátor del motor asíncrono
El estátor esta construido con un apilamiento de chapas de acero. En dichas chapas existen unas ranuras en su parte interior en la cual se coloca una bobina trifásica en la cual se produce un flujo giratorio de amplitud constante distribuido por el entrehierro (chapas). El estátor esta rodeado por la carcasa del motor para su protección. El bobinado trifásico del estátor tiene sus terminales en la caja de bornes del motor inducido o asíncrono. Los extremos iniciales del bobinado están designados con las letras U1, V1 y W1. Y los extremos finales del bobinado están designados con las letras U2, V2 y W2. Sin embargo, aún hoy en día, podemos encontrarnos motores antiguos que todavía utilizan la antigua nomenclatura. Así veremos que en los extremos iniciales del bobinado usan las letras U, V y W y, en los extremos finales del bobinado usan las letras X, Y y Z. Con el fin de realizar un conexionado lo más sencillo posible, los extremos de la bobina no se encuentran dispuestos en la caja de bornes de manera frontal, de esta forma se pueden hacer los conexionados de estrella y de triángulo con la ayuda de unas láminas o chapas agujereadas que realizan el contacto deseado. Con unos simples dibujos lo entenderemos mejor:
Siempre utilizaremos la conexión triángulo cuando necesitemos usar el motor asíncrono o inducido con la tensión más baja según la placa de identificación que lleva el motor en su carcasa. Sin embargo, cuando tengamos que conectar el motor inducido a la tensión más alta realizaremos la conexión estrella en la caja de bornes.
Por ejemplo, si tenemos un motor inducido asíncrono cuya placa identificativa nos indica los valores 45CV, 220/380V, 50/40A,
1300 r.p.m. esto quiere decir que podemos realizar dos tipos de conexiones a dos tipos de tensiones diferentes. Si conectamos el motor a
una red de 220v tendremos 45cv de potencia con un consumo de 50A girando a 1300 r.p.m. y que la conexión en la caja de bornes debe
ser de triángulo. Pero si conectamos el motor a una red de 380v tendremos 45cv de potencia con un consumo de 40A a una velocidad de
giro de 1300 r.p.m. y que la conexión en la caja de bornes tiene que ser en estrella.
De todos modos, las placas identificativas de los motores, siempre nos indican que tipo de conexión debemos realizar.
Lo explico porque puede darse el caso de que nos encontremos con motores inducidos asíncronos con tres posibles
tensiones: 220/380/500V, por poner un ejemplo. Si os encontráis en una situación así, lo habitual es que la tensión
de 220V tenga una conexión en triángulo y que las tensiones de 380/500V tengan una conexión en estrella.
El devanado del estátor del motor asíncrono
En los motores de pequeña y mediana potencia, cada fase esta constituida de bobinas de cobre aislado. En cambio, los motores de gran potencia no se utilizan bobinas de bobinas de cobre, en su lugar se disponen unas barras de cobre aisladas.
Los ejes geométricos de cada devanado, se deben encontrar a 120° de distancia uno del otro.
-Si el motor es de 2 polos, los ejes de los devanados de las 3 fases deben encontrarse a 120° geométricos.
-Si el motor es de 4 polos (2 pares de polos), los ejes de las 3 fases están distantes entre si por 60°= 120°/2.
-Si el motor es de 6 polos (3 pares de polos), los ejes de las 3 fases están distantes entre si 40°=120°/3.
Y así, sucesivamente cuando existan más pares de polos.
El rotor del motor asíncrono
El rotor esta construido por un conjunto de chapas de tal manera que forman un cilindro. En la parte externa del cilindro están dispuestas unas ranuras donde se efectúa el devanado o bobinado. En el caso del rotor de Jaula de ardilla se coloca una serie de conductores de cobre o de aluminio de tal modo que están en cortocircuito por dos anillos laterales. Sin embargo, en el rotor bobinado o de anillos rozantes se dispone un bobinado trifásico parecido al del estátor, en el que las 3 fases se conectan en estrella por un lado, mientras que en el otro lado del bobinado se conectan a unos anillos que están aislados entre sí. En estos anillos es posible conectar e introducir unas resistencias para limitar las corrientes de arranque, mejorar el par y controlar la velocidad.
Funcionamiento del motor asíncrono
En los motores de inducción como su nombre indica, se produce una inducción sobre el rotor. Es entonces cuando se produce
la reacción entre los campos magnéticos del rotor y el estátor. Al conectar la alimentación en los extremos
primarios del estátor, se genera un campo magnético rotatorio porque estamos alimentando al estátor con 3 fases de
corriente alterna, por lo cual, el campo magnético cambia según la frecuencia (Hz) de las 3 fases. Como el rotor se encuentra dentro del área de influencia del campo magnético del estátor, se induce en este rotor una corriente que crea una fuerza que tiende a moverlo en ángulo recto respecto al campo magnético, es decir, lo hace girar.
La velocidad a la cual el campo magnético gira, se le denomina velocidad de sincronismo del estátor y viene
definida por la siguiente fórmula:
La velocidad síncrona del estátor no tiene nada que ver con los motores síncronos, esta es
otra historia.
Como ya hemos mencionado anteriormente, el campo magnético rotatorio producido en el estátor, atraviesa los conductores
del rotor produciéndose una inducción de f.e.m.. Además, como ya sabemos, los diferentes tipos de rotor, ya sea
de Jaula de ardilla o de rotor bobinado, se encuentran en cortocircuito, la fuerza electromotriz o f.e.m. inducida en el rotor produce
una corriente que circula en los conductores del rotor, entonces se produce lo que denominamos un PAR que hace girar el motor.
Ahora bien, el motor de inducción no trabaja con la velocidad de sincronismo porque el rotor reduce la velocidad.
Cuando el motor de inducción se encuentra alimentado pero sin una carga, la f.e.m. en el rotor es tan pequeña que
casi alcanza la velocidad de sincronismo. Pero en el momento en el cual le coloquemos una carga en el eje del motor, el rotor girará
más lentamente. Podemos decir, que si la carga aumenta, el motor se frena hasta alcanzar un PAR indispensable para soportar la
carga.
NOTA: El motor nunca trabaja en vacío. Esto es así porque aunque no le apliquemos una carga,
el eje del motor tiene rozamientos, tiene que mover el ventilador interno del motor, etc.
Cambio de giro del motor asíncrono
Respecto al sentido del giro del eje del motor, diremos que dependerá de cómo hallamos realizado las conexiones con las fases de la red de alimentación, independientemente de si hemos realizado una conexión en triángulo o en estrella. Para invertir el giro del eje del motor solamente tenemos que intercambiar 2 fases de la red de alimentación. Quizá con unos dibujos se comprenda mejor: